
When creating a new product – say, a new kind of aerial working platform for the construction industry – designers are now used to using CAE and digital models to develop and validate the physical responses of multibody systems. After months or years of work, when nearing the finish line, they turn to physical prototyping to make sure everything works as intended once the control code, physical system and electronics are meshed together. It’s often only at the point of physical prototyping that might they uncover crucial oversight. If the new mobile crane system seems so prone to vibrations, it might be prohibitive for operator safety, and once the system is at the production stage, the clock is ticking on finding a solution – and rework costs start adding up.
Even worse – what if the mistake is not discovered until several of these new units were manufactured and sent out to the field, shipped to the customer site?
In both scenarios, there’s a big rush to fix performance issues as fast as possible. One option might be to consider upgrading the hardware at key points of the aerial working platform, in order to reduce the vibrations. This approach would eventually be successful, but would suffer delays from trying to source the new parts – and the cost of oversizing components might quickly start eating up profit margins.
This kind of scenario is where a digital model is connected to a source of real-time operational data – to form a Digital Twin – might offer a better solution. The Digital Twin provides a virtual testbed to explore and correct the performance issues. By taking a system-level approach to simulating the crane’s dynamics, the behavior witnessed in the field can be related back to the simulation results of the Digital Twin. The specific movement patterns that give rise to the vibrations can be identified, and actions can be taken in the control code or by tweaking the motion profiles themselves so that they are reduced to a safe level or even eliminated. In this method, no new hardware is required. If this kind of solution sounds too good to be true, then perhaps you only need to learn a bit more about the technology and process behind dynamic system simulations.
How Does a Digital Model Become a Digital Twin?
A Digital Model is a broad term that refers to the dynamic simulation of multiple subsystems of a given design, considered together in a single, overarching virtual modeling environment. The digital model, in this context, is used to explore just how all the subsystems actually operate and respond to inputs together over time. The subsystems included can vary, allowing you to consider the impacts of multiple domains (mechanical, electric, hydraulic, and so on) in a single simulation environment during integration.
With these kinds of simulations, you’ll get a powerful tool that allows you to safely test a variety of conditions for inputs, as well as make on-the-fly changes to drives and physical elements to see if changing out sub-components have the desired effect. This allows the designer to spot all kinds of cross-system interactions ahead of physical prototyping.
Once the digital model is created, it can be augmented with operational data from sensors or measurements from devices in the field. This allows the digital model to be kept in-step with the production hardware, forming a Digital Twin. Additional value comes when that contributes to finding a performance issue you may have otherwise missed during product development, allowing you to find a less intrusive solution. While some of these items may show up during physical prototyping, it would be far more efficient to catch these issues before needing to build the physical prototypes, and certainly before commissioning the production system. If you’ve already got a product in operation at a customer’s site, you could also stand to save both time and money by identifying issues via simulation, rather than expensive testing on the physical product.
Building the System-Level Model – The Digital Twin
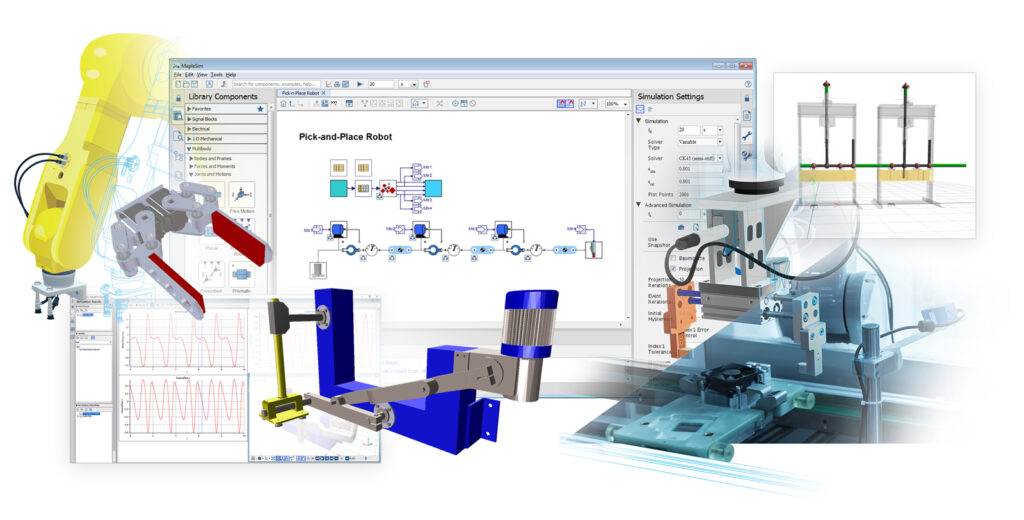
The key component of a successful, simulation-based solution is the digital model. You’ll need to create this in a system-level simulation tool (such as MapleSim). Tools like MapleSim offer hundreds of built-in components that you can drag-and-drop into place, creating a dynamic representation of your product. These components span several domains of engineering, allowing you to build your model to include the effects from your overall design. For each of these components, you can customize their parameters to match the specifics of your design – for example, the frictions on a ball joint.
You can use operational data to drive the model in the form of parameters for the model, which can include PID inputs, PLC code, or even use direct connectors from your existing automation development software. This Digital Twin can be identify the issue, find a solution, and to test and validate the control code update or physical sub-component change prior to applying it to the production system.
System-level modeling may not be a skillset your team has internally, but the demand for these skills is growing. As such, system-level modeling tools have become increasingly user-friendly, with templates to get started, and tool vendors now offer services for both training and model development.
System-level modeling tools are often expandable with domain-specific libraries, allowing you to include dynamics from various domains in the same model. With MapleSim, there are a variety of toolboxes offered to expand the kinds of abilities you have when creating a digital twin.
Here are just a few examples of the toolboxes available within MapleSim, as an example of other domains you might want to include when building your digital twin:
- MapleSim Tire Library – Use high-performance, pneumatic tire components in your models, including industry-standard tire force models like Fiala, Calspan, and Pacejka’s magic tire formula.
- MapleSim Battery Library – Incorporate physics-based, predictive models of battery cells into your overall system model to understand loading effects, battery heat flow, and more.
- MapleSim Driveline Library – A collection of components, transmission subassemblies, and powertrain examples that help you understand your system from the engine to the differential, wheels, and road loads.
- MapleSim Heat Transfer Library – Simulate the effects of heat transfer across a multidomain system, allowing users to diagnose heat transfer impacts much earlier than typical FEA-based workflows.
- MapleSim Web Handling Library – Simulate roll-to-roll processes when handling paper, foil, and film, helping you manage tensioning, optimize the web speed and reduce web slippage
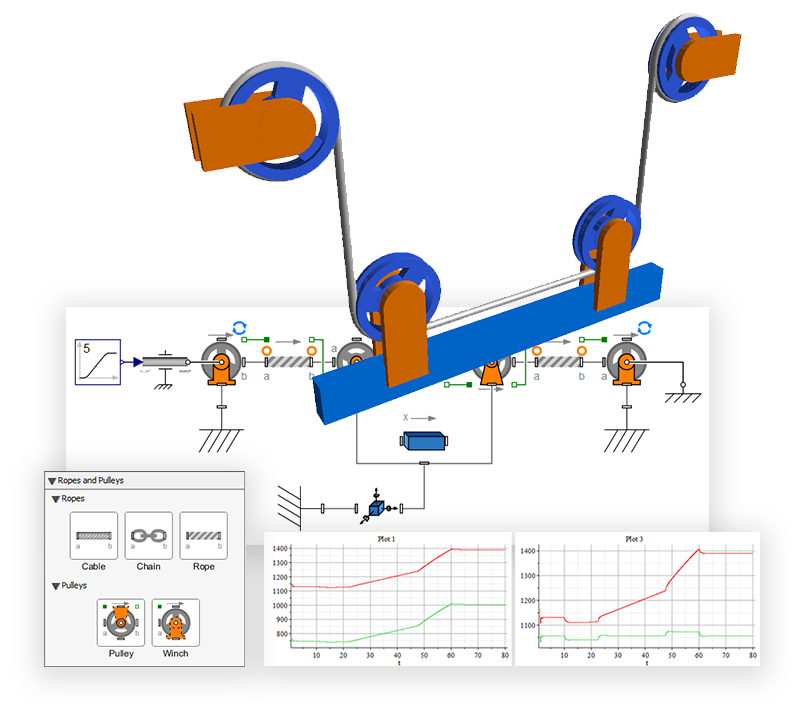
- MapleSim Ropes and Pulleys Library – Create winch and pulley systems as part of overall machine development, including both 2-D and 3-D systems that can be easily visualized as 3-D models.
You May Also Like

Fixing Machine Vibration Iss ...
15 September 2025

What is Virtual Commissionin ...
15 September 2025

The Blurring Line between Vi ...
16 June 2021
Popular Post

Fixing Machine Vibration Issues for Less
September 15, 2025What is Virtual Commissioning?
September 15, 2025
Turnkey Solutions by Maplesoft

About the Editor
